


München, Deutschland, 12. August 2024: Kitekraft, Pionier in der Entwicklung von Flugwindkraft, gibt heute bekannt, mehrere Flüge mit voller Sensor-Redundanz und anderen Verbesserungen der Zuverlässigkeit durchgeführt zu haben. Mit diesen neuen Entwicklungen ist ein Kitekraft-System jetzt so robust, dass jeder Sensor am Kite oder an der Bodenstation ausfallen kann, das System diesen Ausfall aber erkennt, in einem sicheren Zustand bleibt und normal im Schwebeflug zur Bodenstation zur Überprüfung landet. Das Erreichen dieser Redundanz ist ein wichtiger Meilenstein für Kitekraft und zeigt den Fokus auf Sicherheit und hohe Zuverlässigkeit. Außerdem gibt es neue Updates zu unseren Kollisionsschutzlichter, dem immer besseren Abgleich zwischen Realität und Simulationsdaten sowie ein neues Flugtest_Video.
Wenn ein Sensor ausfällt, wird dies innerhalb von 25 Millisekunden bemerkt und behoben
Bei der Vielzahl von Sensoren, mit denen unsere Systeme arbeiten, wäre es zu viel, auf jedes Detail unseres Sensor-Redundanz einzugehen. Stattdessen tauchen wir tiefer in ein spezifisches Beispiel ein: Das Tether ist an der Bodenstation an einer zweiachsigen kardanischen Aufhängung befestigt, die eine definierte Lastübertragung ermöglicht und eine Abnutzung des Tether verhindert. Die beiden Achsen sind Elevation und Azimut, deren Winkel jeweils redundant durch zwei magnetische, berührungslos arbeitende Potentiometer an jeder Drehachse gemessen werden. Das heißt, wenn z.B. die beiden Azimut-Potentiometer nicht den gleichen Winkel anzeigen, wird sofort erkannt, dass etwas nicht stimmt und als Fehler markiert. Diese Überprüfung erfolgt in jeder Regelschleife, die alle 25 Millisekunden ausgeführt wird. Ein solcher Fehler kann sowohl durch ein mechanisches als auch durch ein elektrisches Versagen verursacht werden. In erster Linie wird ein Fehler durch qualitativ hochwertige Teile und eine gute Qualitätskontrolle verhindert. Da aber die Wahrscheinlichkeit, dass ein Fehler auftritt, zwangsläufig höher als 0 % ist und nur ein Design ohne einen einzigen Fehlerpunkt, das Kitekrafts Designziel ist, einen Fehler angemessen behandeln und darauf reagieren kann, ist es eigentlich nicht so wichtig, die Ursache zu kennen. Wenn der Winkel des fehlerhaften Potentiometers unrealistisch weit abweicht, wird es von der Steuerlogik sofort als fehlerhaft erkannt und das andere, gesunde Potentiometer wird stattdessen verwendet. Wenn der Winkel nur ein wenig abweicht, so dass es unklar ist, welches Potentiometer das fehlerhafte ist, wird die Sache interessanter. In diesem speziellen Fall ist die Software so programmiert, dass sie entscheidet, dass keinem Potentiometer vertraut werden kann und andere Werte wie das GPS verwendet werden, um alle notwendigen Werte (z. B. die Position des Kites) zu ermitteln, die von den Steueralgorithmen benötigt werden. Wenn ein Fehler auftritt, wird der Drachen normal an der Bodenstation gelandet, damit der Fehler überprüft und behoben werden kann.
Die Ingenieure von Kitekraft testen das korrekte Verhalten der Algorithmen zur Fehlererkennung, -behandlung und -steuerung ständig mit Monte-Carlo-Simulationen. Darüber hinaus werden Schwebetests in der Maschinenhalle durchgeführt, bei denen Stecker abgezogen oder Fehler provoziert und auf andere Weise per Software emuliert werden, um das beabsichtigte Verhalten in der Realität zu validieren. Alle diese Tests sind erfolgreich verlaufen.
Neu entwickelte Kollisionsschutzlichter für Sicherheit bei schlechter Sicht und in der Nacht
Kitekraft hat die eigens entwickelten Kollisionsschutzlichter (engl. Anti-Collision Lights, ACLs) implementiert, die sowohl am Kite als auch an der Bodenstation redundant angebracht sind. Es gibt 4 ACLs am Kite und 4 ACLs an der Bodenstation, sowohl um Sichtbarkeit aus allen Richtungen sicherzustellen als auch um eine Fehlertoleranz zu gewährleisten, sollte ein Licht ausfallen. Alle ACLs blinken synchron in einem Doppelblinkmuster, das durch die Kommunikationskabel in der Leine aktiviert und vom Bordcomputer des Kites gesteuert wird. Dadurch kann ein Pilot eines sich nähernden Flugzeugs den Kite und die Bodenstation (mit der Leine dazwischen) visuell als ein zusammenhängendes System identifizieren. Die ACLs sind grün gemäß den Vorschriften der Europäischen Agentur für Flugsicherheit (EASA) für unbemannte Luftfahrzeuge (UAS).
Im folgenden Video sehen Sie ungeschnittene Aufnahmen von einem Flug von Kitekraft mit voller Sensorredundanz und ACLs in Aktion. Das Zeil dieses Fluges war es, die Funktion der vollständigen Sensor-Redundanz zu validieren und Verbesserungen der Regleralgorithmen zu überprüfen.
Gute Übereinstimmung zwischen Flugtest-Messdaten und Simulation
Ein großer Teil der Entwicklungsarbeit von Kitekraft fließt in die Sicherstellung, dass unsere Simulationsmodelle die Realität so gut wie möglich abbilden. Die Simulation ist Teil des intern entwickelten C++ Systems Engineering Frameworks, das auch Regler, Optimierer und vieles mehr beinhaltet. Mit einem solchen "Kitesimulator" können Kitekraft-Ingenieure Verbesserungen an Hard- und Software, wie z. B. Änderungen an der Flügelkonfiguration oder an Flugalgorithmen, sehr schnell und zu sehr geringen Kosten testen und so die Zuverlässigkeit und Effizienz des Systems schnell maximieren. Wenn bei Simulationen etwas schief geht, kann der Algorithmus einfach korrigiert und die Simulation neu gestartet werden.
Dies wird intensiv genutzt, um die Hardware und Software von Kitekraft zu verbessern. Zwischen den Testflügen kann es Dutzende bis Hunderte von Verbesserungen geben, um das System und den Flug des Kites zuverlässiger gegen Komponentenausfälle, robuster gegen Windböen oder Richtungsänderungen und effizienter zu machen. Dies ist auch ein entscheidendes Instrument für die Arbeit an der nächsten Generation: der 100-kW-Produktversion des Systems.
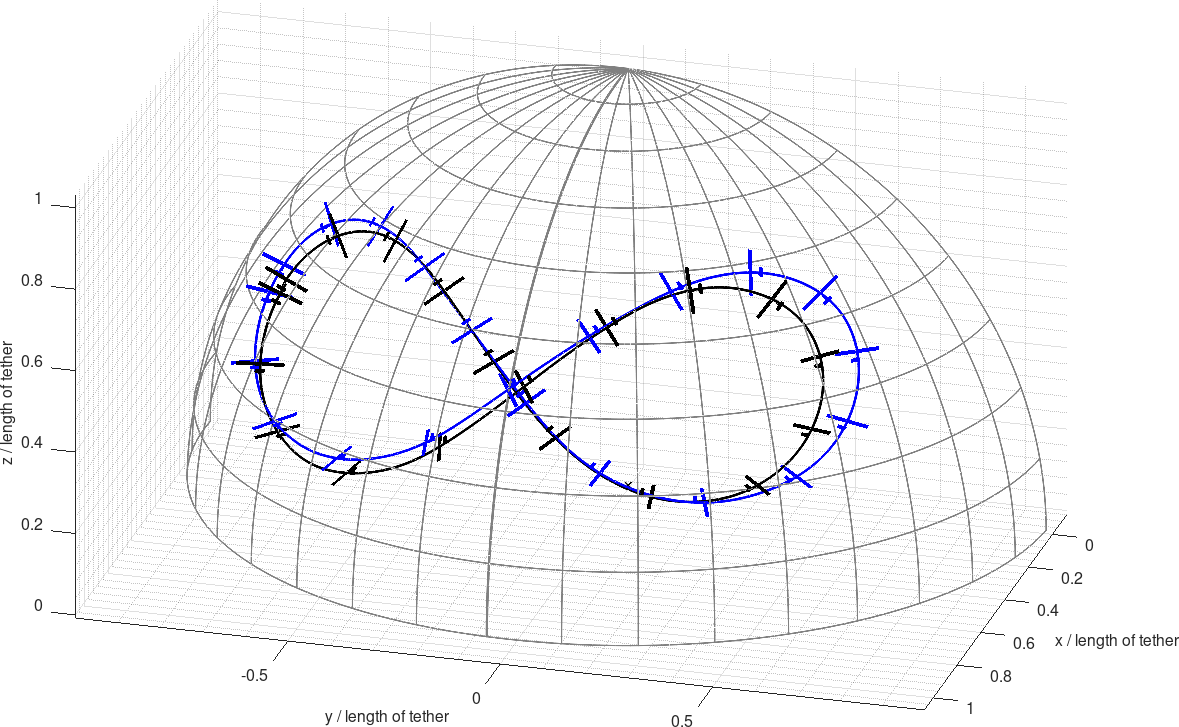
Nachfolgend ist die Position und Ausrichtung des Kites dargestellt, die während eines der jüngsten Flugtests aufgezeichnet wurde. Die Messdaten (in schwarz) können so mit den Werten aus der Simulation (blau) verglichen werden. Die nahezu perfekte Übereinstimmung beider Flugkurven zeigt die sehr gute Übereinstimmung von Simulation und Realität, wobei die Realität leicht bessere, weil enger geflogene, Achten aufzeigt.
Ungeschnittenes 1h+ Flug-Video
Kitekraft führt immer mehr Flüge durch, mit immer größerer Robustheit und Effizienz. Das Team erhöht kontinuierlich die Flugzeit und den Flugbereich. Unten sehen Sie ein ungeschnittenes Video der Bordkamera von einem der jüngsten Testflüge von Kitekraft, das über 1 Stunde Flugzeit mit 159 geflogenen Achterfiguren und 90 km zurückgelegter Strecke umfasst.




